Good sensors with noise
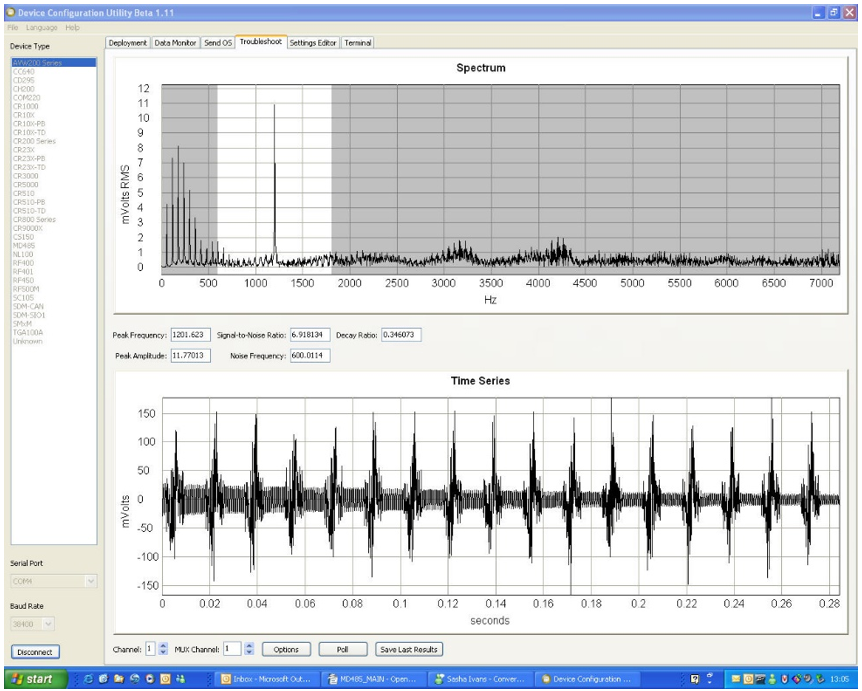
The measurements graphed in Good sensor with a narrower range and noise (600 to 1800 Hz) and Good sensor with a wider range and noise (450 to 6500 Hz) are made by the same sensor used for the two previous figures. However, for Good sensor with a narrower range and noise (600 to 1800 Hz) and Good sensor with a wider range and noise (450 to 6500 Hz), a drill is running about 1/2 inch away from the sensor. This shows the effects of narrowing the begin and end frequencies to deal with noise generated by an electric motor. The narrow frequency range in Good sensor with a narrower range and noise (600 to 1800 Hz) has reduced the effects of the noise source and has yielded a signal-to-noise ratio of four times better than in Good sensor with a wider range and noise (450 to 6500 Hz). Notice that if the begin frequency in Good sensor with a wider range and noise (450 to 6500 Hz) was much less than 450 Hz, the 60 Hz harmonic would have been the dominant frequency.
A powered drill 1/2 inch away from the sensor is an invasive noise source. When the sensor is measured with the drill a few inches away, the harmonics of the 60 Hz decrease and do not dominate the wire natural frequency. Sensors with a frequency range of less than 450 Hz should work fine even in the presence of a 50 or 60 Hz noise source; however, they should be characterized.

Check manufacture specifications for the sensor frequency and excitation range before picking the begin and end frequencies and excitation voltage.