Present weather sensor
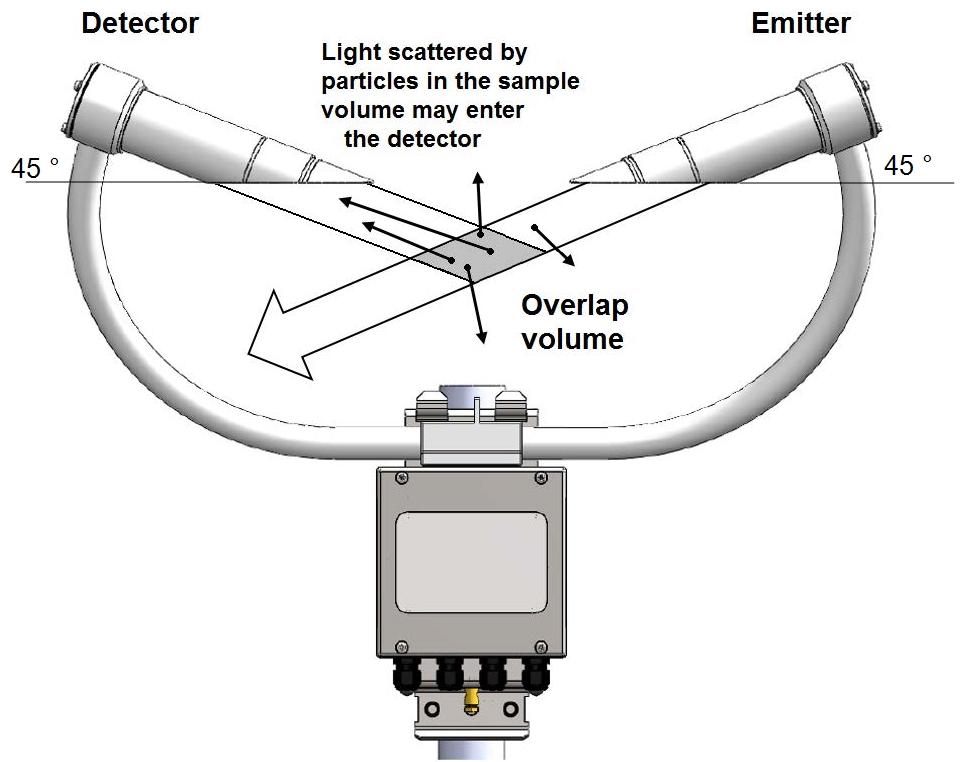
The present weather sensor consists of an emitter and detector aligned as in
Particles in the sample volume scatter light in all directions, including into the detector. The emitter produces a beam of near infrared light pulsed at 1 kHz. A
detector has a field of view that overlaps the beam. Light scattered by a particle (for example, a fog droplet or particle of
precipitation) from the overlap or sample volume towards the detector is detected
by a photodiode and recorded as a signal. The size of the signal is proportional to the extinction of the emitted beam caused by scattering. The
scattering signal averaged over 1-second is used to calculate an extinction
coefficient (EXCO), assuming the relationship between forward scatter and EXCO is linear. Sixty 1-second averages are then averaged to give a
1-minute average EXCO. This is then converted to a value of meteorological
optical range (MOR) using Koschmieder law:
MOR = 3/EXCO, where MOR is in km and EXCO is in units of km-1.
The calibration for visibility was derived by comparison with other high-grade, forward-scatter sensors and has been verified in a study by trained
meteorological observers. This is called MOR calibration in this manual.
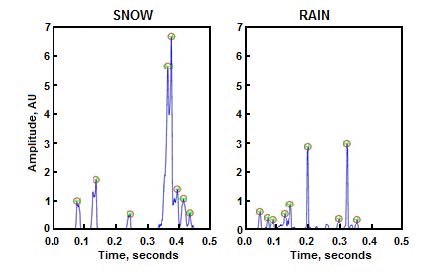
The present weather sensor is capable of identifying weather type in addition to measuring
visibility. Weather type is identified through analysis of the amplitude and width of spikes in the avalanche photodiode (APD) signal, which corresponds to the particles of precipitation traversing the sample volume. The width of the spikes, which reflects the time taken for the particles to descend through the sample volume, serves as a proportional indicator of their fall speed (see Signals from large, slow-falling snowflakes and smaller, faster raindrops).
The AtmosVue 40 has a temperature sensor. Three parameters (fall speed, size,
and temperature) are used to identify the particle type. If an additional external
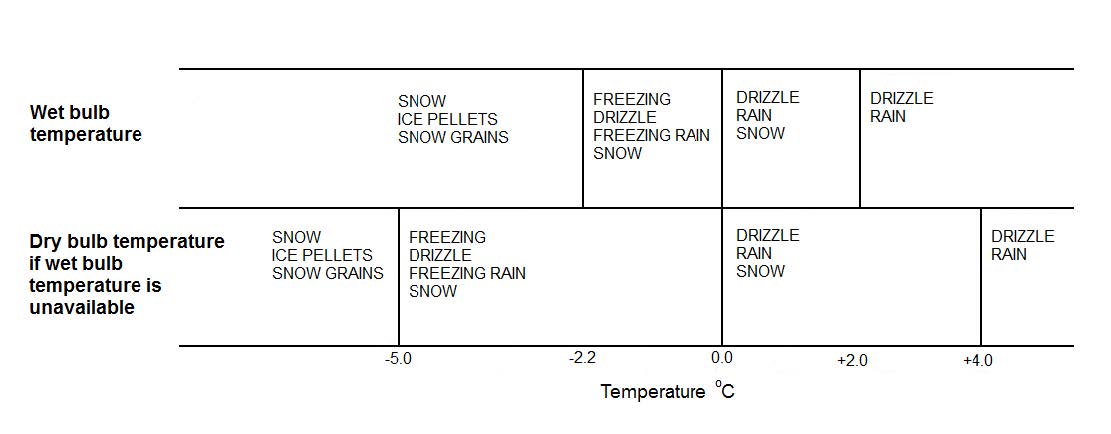
temperature and relative humidity probe is connected, then a wet-bulb temperature
can be calculated. This provides additional information to more accurately distinguish between liquid and frozen particles, especially when the temperature in near 0 °C.
Possible precipitation types based on wet-bulb and dry-bulb temperatures shows how these temperatures are used to define possible precipitation
types around 0 °C.
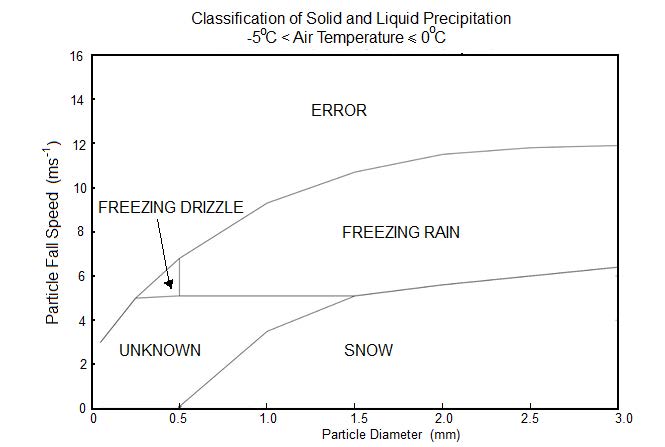
The processing algorithm then works with several maps, such as A typical size/speed map used by the AtmosVue 40 present weather algorithm, to identify each particle.